Par le Dr Kalevi Tervo, ingénieur exécutif d’entreprise et responsable du programme mondial et le capitaine Eero Lehtovaara, responsable des affaires réglementaires, ABB Marine & Ports
13 avril 2021
Il est prouvé que la sécurité des navires bénéficiera de la technologie améliorant la surveillance du pont.
Les réglementations en matière de sécurité maritime ont été – et pour des raisons valables – traditionnellement strictes et se sont souvent développées de manière à freiner l’innovation. Près de deux décennies après l’arrivée à l’OMI du remède des normes « basées sur les objectifs » et de « l’équivalence technique », les règles basées sur l’évaluation des risques et la fonctionnalité continuent de faire face à une bataille acharnée pour redéfinir une culture de la sécurité basée sur les « choses à faire et à ne pas faire » . L’utilisation d’algorithmes prédictifs pour automatiser ou semi-automatiser des aspects des opérations des navires est déjà acceptée comme moyen d’améliorer la sécurité ainsi que l’efficacité opérationnelle. Le positionnement dynamique, par exemple, est devenu une technologie de contrôle des navires grand public dont la capacité d’avancement non seulement répond aux conditions, mais les anticipe, sur la base des données accumulées.Des algorithmes prédictifs sont maintenant également utilisés pour améliorer la sécurité dans d’autres domaines du contrôle des navires, y compris les manœuvres et l’assiette. optimisation et freinage. Cependant, des drapeaux rouges réglementaires sont soulevés lorsque la même logique est appliquée aux techniques de visualisation 3D et de connaissance de la situation qui permettent de mieux «voir» que les êtres humains et, à partir des données accumulées, d’évaluer la situation avec plus de cohérence.
Les législateurs disent que l’automatisation ne devrait être favorisée par rapport à l’alternative humaine que si la sécurité est «égale ou meilleure».
Cependant, établir la base de la comparaison n’est pas chose facile. Les conventions sur la sauvegarde de la vie humaine en mer (SOLAS), les normes de formation, de certification et de veille (STCW) et le règlement pour prévenir les abordages en mer (COLREG) sont descriptives pour expliquer la relation entre l’équipage à la passerelle et le navire. Les performances humaines varient selon les individus mais aussi selon la santé, la vigilance et l’humeur, l’heure de la journée et les conditions. Un domaine dans lequel la formule «égal ou meilleur» peut pencher en faveur de l’automatisation concerne le rôle de vigie. Le but des règles de navigation étant de prévenir les collisions, il s’ensuit que le but de la vigie est d’assurer la sécurité du navire et de tout autre navire à proximité en transmettant les informations à l’officier de quart de manière ordonnée avec le meilleure précision possible.
Les navires SOLAS modernes ont un équipement de navigation obligatoire pour aider à déterminer la position, le cap et à détecter les obstacles pertinents dans les environs. Dans la pratique, les navires sont généralement équipés d’un radar, d’un gyrocompas, d’un ECDIS, d’un système de positionnement GNSS et d’un récepteur AIS. En plus de ces dispositifs, le guetteur utilise ses propres sens, principalement les yeux et les oreilles pour percevoir l’environnement.
Les performances de la vue humaine dépendent de la santé oculaire et de la clarté de la vision, mais aussi de la lumière et des obstacles (comme le brouillard) dans la ligne de mire. La vue, l’ouïe et d’autres facultés sont en fait considérées comme quantifiables à l’aide des conventions STCW, mais les variations de la performance humaine sont inévitables – quelle que soit la vigilance. Même en mettant de côté les forces et les faiblesses individuelles, des facteurs externes limitent la capacité de toute surveillance humaine à détecter des cibles depuis le pont. Lorsque la visibilité est considérée comme «parfaite», la courbure de la Terre limite la portée maximale de la vision humaine, par exemple.
Si cette observation semble avoir des proportions époustouflantes, il faut noter qu’un belvédère avec une vision « parfaite » positionné à une hauteur de 30 mètres ne pourrait pas du tout voir une autre structure de 30 mètres de haut s’il faisait 39,1 km. un moyen. Cependant, la vision d’un véritable belvédère ne serait pas parfaite: sur la base de l’exigence visuelle minimale des officiers de pont, la résolution angulaire minimale d’un belvédère humain est de 2 «minutes d’arc». Le même observateur de 30 mètres de haut ne verrait en fait qu’une structure de la même hauteur à une distance de 31,7 km. En conditions réelles, la visibilité du belvédère est également influencée par le brouillard, la brume, la pluie, la fumée, etc. La portée de visibilité dépendra donc non seulement des conditions de luminosité, mais aussi des propriétés de la cible. Pour certains, ces limites et ces zones d’incertitude font simplement partie intégrante du monde réel. En outre, les performances de la caméra sont également affectées par le monde réel – par la qualité de l’air, l’humidité, la vapeur, les conditions de lumière, le contraste, la couleur et la réflectivité de l’objet. Là encore, la qualité et la mise au point de l’objectif peuvent varier, tandis que les vibrations mécaniques peuvent également compromettre les performances.
Monde réel numérique et connecté
Cependant, dans le monde réel où les navires opèrent aujourd’hui, l’équipement d’aide à la navigation SOLAS avec lequel les humains interagissent est déjà numérique. Considéré du point de vue fonctionnel plutôt qu’humain, le belvédère effectue la «fusion de capteurs» en combinant des entrées visuelles, radar, graphiques, puis propose une évaluation «manuelle» globale de la situation.
Pour atteindre le même niveau de performance avec une surveillance basée sur la machine, il est tout d’abord essentiel de prouver que la vision par ordinateur peut atteindre un niveau de performance adéquat aux conditions limites. Par conséquent, les principales tâches pour démontrer l’équivalence au moyen de la technologie visuelle sont: [1] Détection d’une cible dont la dimension minimale projetée s’étend sur 2 minutes d’arc au-dessus de l’horizon dans de bonnes conditions de visibilité; [2] Détection de la cible dont la dimension minimale projetée s’étend sur plus de 2 minutes d’arc dans le champ de vision à la plage de visibilité dans des conditions de visibilité réduite; [3] Détection d’une cible devant l’horizon qui s’étend sur 2 minutes d’arc dans la dimension minimale projetée dans de bonnes conditions de visibilité
Si ce qui précède peut être démontré, le niveau minimum d’une surveillance – c’est-à-dire la détection des cibles – pourrait être démontré comme «aussi bon ou meilleur» que l’humain.
Essais et apprentissages
Afin de vérifier les assertions théoriques, un système de sensibilisation actionné par caméra a été testé autour de l’archipel d’Helsinki, en utilisant une configuration qui fonctionnait avec une caméra PTZ Full HD et un zoom optique 30x. Le champ de vision horizontal de la caméra avec des réglages de zoom maximum est de 2,3 °, avec la caméra installée à une hauteur de 10 mètres. Le navire sur lequel la caméra était montée était stationnaire pendant l’expérience.
Deux embarcations de plaisance décrites ont été utilisées comme cibles détectées. Les bateaux ont été dirigés à une distance précise du navire sur lequel la caméra était montée. Le temps était clair, avec un vent de 4 m / s du nord-est. La pression du vent était de 1019 hPA et la visibilité était bonne. L’heure de la journée pendant l’expérience était de 04h00 à 06h00. En utilisant l’approche conventionnelle, on s’attendrait à ce que la «petite embarcation de plaisance» soit détectée à environ 5,8 km. Cependant, en utilisant la nouvelle configuration, le bateau était toujours détectable à 6,8 km.
En résumé, le tableau 1 montre les distances de détection par caméra pour diverses cibles pertinentes pour la mer et les compare aux distances de détection estimées d’un belvédère humain. Il offre un compte rendu détaillé de la manière dont la configuration de la caméra peut atteindre des performances égales ou supérieures à celles de l’œil humain dans des conditions de visibilité jugées bonnes.
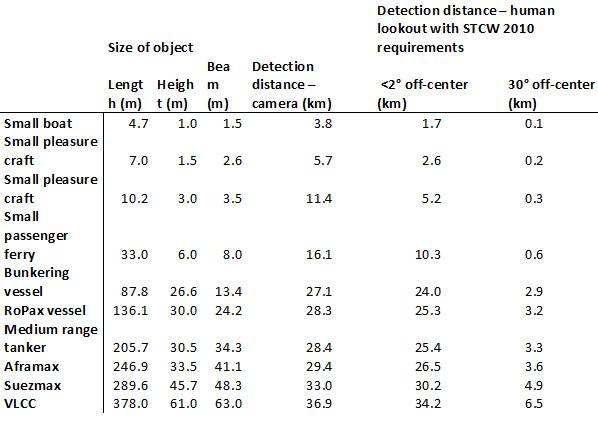 Tableau 1
Tableau 1
Les technologies de perception modernes atteignent également des performances au-delà des capacités de perception humaine pour d’autres raisons. Par exemple, la technologie de caméra infrarouge (IR) peut détecter des cibles dans des conditions de visibilité réduite qu’un humain avec des jumelles ne peut pas.
Les caméras infrarouges à ondes courtes (SWIR) permettent de détecter d’autres navires même à travers le brouillard et les caméras infrarouges à ondes longues (LWIR) permettent de détecter d’autres navires, les débris et les obstacles flottants, même dans des conditions de noir absolu.
Il est important de reconnaître que ces technologies haut de gamme s’accompagnent de coûts, ce qui signifie que toute prétention à être «meilleur qu’un humain» doit être pesée du point de vue tant financier que pratique. Ce faisant, cependant, il convient de considérer que les avantages automatisés sont cumulatifs: la surveillance humaine doit traiter, mémoriser et suivre les cibles détectées visuellement et réconcilier ces informations avec celles provenant des radars AIS et ARPA.